Simultaneous source deblending using a deep residual network
The rapid development of deep learning has prompted researchers across disciplines to consider learning-based approaches as alternatives to conventional methods. In this study, we apply a deep residual convolutional neural network to the problem of simultaneous-source deblending. Training data are produced by synthesizing a simultaneous-source acquisition from the Valhall OBC data set. The data are sorted into common-receiver gathers where blended signal appears as erratic noise. Regular patches are extracted from the blended and unblended gathers to form training pairs. After training, the trained network is able to produce deblended receiver gathers that remove large parts of the erratic noise. Examination of the deblended shot gathers indicates that some signal is not recovered, suggesting the potential for further improvement.
Simultaneous-source acquisition can reduce cost and acquisition time, compared to conventional seismic surveys, by allowing multiple seismic sources to fire within a short time interval (Beasley et al., 1998). A challenge in blended acquisition is the existence of blending noise i.e. the superposition of a primary shot with secondary sources. The process of separating a blended gather into its constituent shot gathers is known as deblending. While blending noise typically appears as strong, coherent noise in the common-shot domain, it manifests as erratic noise in the common-receiver domain. Deblending is conventionally performed using denoising methods (e.g. Beasley (2008)) or inversion-based methods (e.g. Abma et al. (2010)). State-of-the-art performance achieved by convolutional neural networks (CNNs) for select image-denoising tasks (e.g., Zhang et al. (2017)) has prompted us to explore the efficacy of learning-based deblending schemes. We adopt a supervised learning approach using convolutional neural networks (CNN) for simultaneous-source deblending. The learning task minimizes the mean-squared error loss function defined as

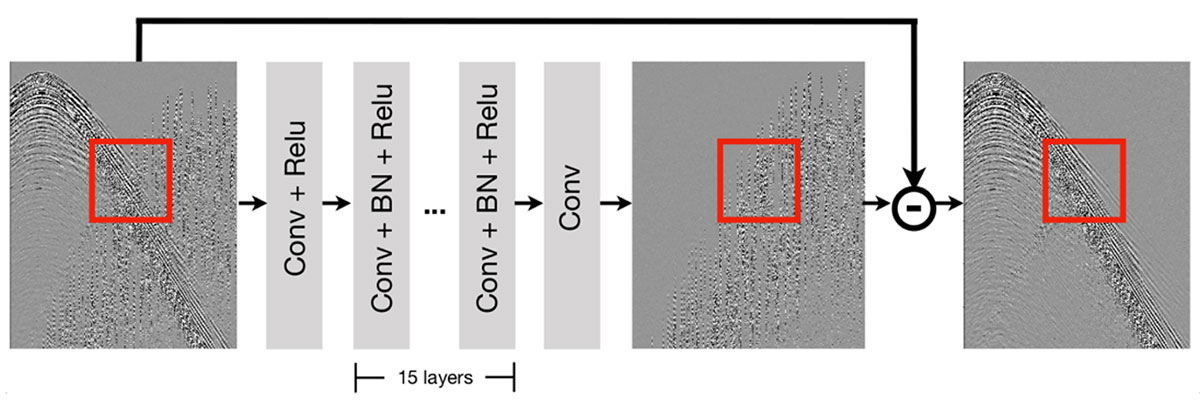
where xi are the blended observations and yi = xi − ni are the deblended observations; ni is the blending noise. The scalar N represents the number of training samples. The non-linear function R(xi; Θ) represents a CNN parameterized by learnable weights Θ. For the denoising task, we implement the denoising CNN (DnCNN) architecture proposed by (Zhang et al., 2017). The DnCNN can be defined as

where f (xi; Θ) is a deep CNN. A schematic diagram of the network architecture is presented in Figure 1. The residual connection (Equation 2) has been demonstrated to improve the performance and training stability of deep networks (He et al., 2016). Furthermore, the learned network learns features of the signal thereby improving its ability to transfer to other denoising tasks (Zhang et al., 2017). We test a deep residual network and a conventional CNN (i.e. when R(xi, Θ) = f(xi; Θ)).
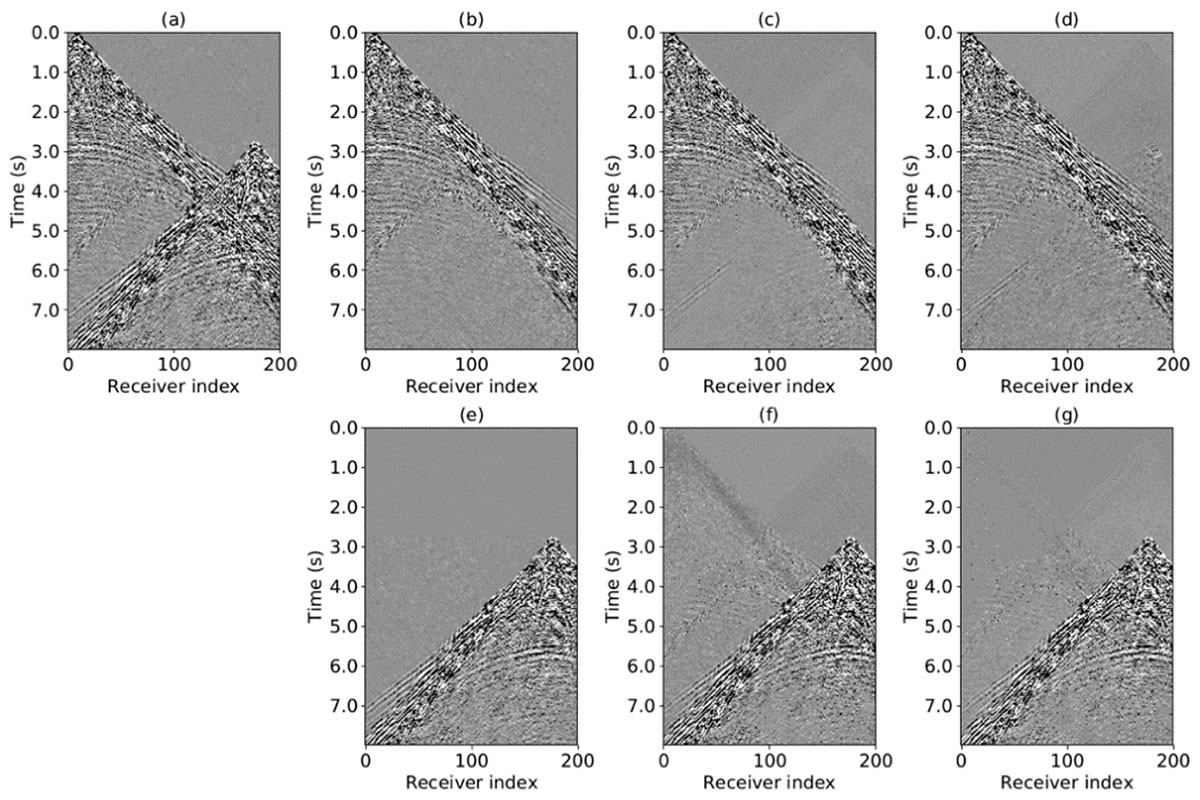
We synthesize a blended acquisition by manually blending the Valhall ocean bottom cable (OBC) seismic dataset (Van Gzestel et al., 2008). The training data consist of 27 128×128 overlapping patches extracted from each of the 2098 common-receiver gathers (CRGs). Training is performed with a batch size of 32 using the Adam optimizer and a learning rate of 1 × 10−4. The results of the learned networks are summarized in Table 1 and Figure 2.
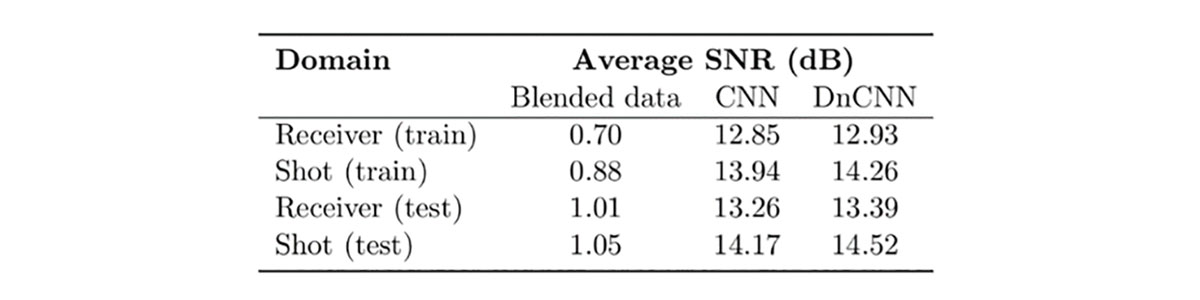
The learned networks appear to offer acceptable denoising results with the DnCNN outperforming the conventional CNN. In this study, we prioritize accurate recovery of the target signal. The residual connection in the DnCNN allows for improved signal recovery apparent in the reduced signal leakage compared to the CNN result (Figures 2f, g) Future work will benchmark the learning-based deblending approach against conventional inversion-based methods. Further exploration is required to test the ability of the learned networks to generalize to different datasets containing different signal and acquisition properties.
Acknowledgements
We would like to thank BP for providing the Valhall data set. We would also like to thank the sponsors of the SAIG group for their continued support.
References
Abma, R., T. Manning, M. Tanis, J. Yu, and M. Foster, 2010, High quality separation of simultaneous sources by sparse inversion, 72nd EAGE Conference and Exhibition.
Beasley, C. J., 2008, A new look at marine simultaneous sources, The Leading Edge, 27, 914–917.
Beasley, C. J., R. E. Chambers, and Z. Jiang, 1998, A new look at simultaneous sources, SEG Technical Program Expanded Abstracts 1998, 133–135.
He, K., X. Zhang, S. Ren, and J. Sun, 2016, Deep residual learning for image recognition, 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 770–778.
Zhang, K., W. Zuo, Y. Chen, D. Meng, and L. Zhang, 2017, Beyond a gaussian denoiser: Residual learning of deep CNN for image denoising, IEEE Transactions on Image Processing, 26, 3142–3155.

Gian Matharu received his B.Sc. in Honours Physics and M.Sc. in Geophysics from the University
of British Columbia. His M.Sc. work involved studies of crustal anisotropy in subduction zones and tomographic inversion. As a member of SAIG (since 2014) his Ph.D. research has been focused on elastic full waveform inversion, inverse problems and applications of deep learning in geophysics.
Wenlei Gao received his B.Sc. in 2010 and M.Sc. in 2013 in Geophysics from China University of Petroleum, Beijing, China. From 2013 to 2014 he worked for the Research Institute of China National Offshore Oil Company as seismic data interpreter. He is currently enrolled in the Ph.D. program in Geophysics in the University of Alberta. His research is mainly focused on multicomponent seismic data registration and least-squares migration.
Rongzhi Lin received his B.Sc. in 2012 and M.Sc. in 2015 in Geophysical Prospecting from China University of Petroleum, Beijing, China. He also received his second M.Sc. in 2016 in Geoscience in Khalifa University, Petroleum Institutes from Abu Dhabi, UAE. From 2014 to 2018, he worked on seismic attenuation imaging and instantaneous frequency analysis as a research assistant in Khalifa University, Petroleum Institutes. He is currently enrolled in the Ph.D. program in Geophysics in the University of Alberta. His research is mainly focused on Deblending and machine learning.
Yi Guo received her B.Sc. in 2012 and M.Sc. in Geophysics from China University of Petroleum, Beijing, China. From 2014 to 2016 she received her second M.Sc. in Geosciences from Khalifa University of Science and Technology, Abu Dhabi, UAE, where she was also working as a research assistant from 2016 to 2018. She is currently working toward the Ph.D. degree in Geophysics at the University of Alberta. Her research interests include seismic signal processing, sparse sensing, and machine learning.
Minjun Park received his M.Sc. from the University of Alberta in Geophysics with research investigating the use of convolutional neural networks for automatic velocity analysis. He is currently pursuing a Ph.D. in Geophysics at Stanford University. His research interests are in machine learning and seismic imaging.

Comments
Share your thoughts with us! Comments are moderated. Spam, inappropriate or abusive comments will be removed.


